Swetha Ashok

Electrical Engineering & Computer Science at UC Berkeley
Contact Me:
swethaashok77@gmail.com
Phone: (669) 270-9083
Located: San Jose & Berkeley, CA
FIRST Robotics Competition
Over my four years with Team 2643, I progressed from Safety Captain to Program Manager to President, overseeing the full lifecycle of three competitive robots. As Program Manager, I implemented Gantt charts to synchronize the mechanical, electrical and programming build timelines for a 50+ member team.
2023 Charged Up
The 2023 season game required a robot capable of manipulating cones and cubes to place them on multi-level racks.
| Cone | Cube |
|---|---|
 |
 |
Additionally to Program Manager, I was part of the electrical subteam and directed the wire routing and management from the motors to the Power Distribution Hub (PDH). We initially placed the PDH beneath the drivetrain to maximize chassis space for mechanical scoring mechanisms. This layout made multimeter debugging and signal tracing nearly impossible during competitions.
During competition, we ran into many CAN bus errors and lost connection with the drivetrain motors, resulting in the robot spinning uncontrollably. One such instance of this led to our robot knocking over an official camera, and a key learning moment for our 2024 robot.

2024 Crescendo
For the 2024 season, I utilized my findings from the previous year to lead the design of a more robust robot capable of launching foam rings into a 6.5 ft goal. I created a naming scheme and taught new members how to use SOLIDWORKS, and maintained the master CAD assembly.
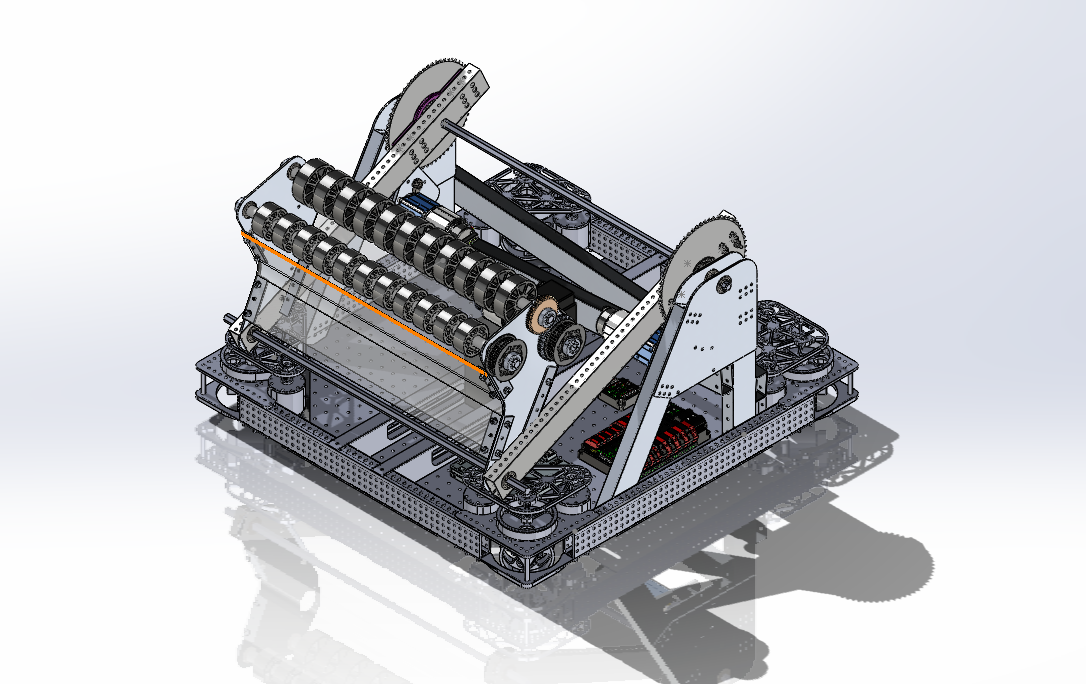
To solve the 2023 troubleshooting issue, I moved all critical electrical components to the top of the drivetrain. I integrated them within the arms of the shooter to ensure both accessibility for debugging and protection from field collisions.
Master CAD
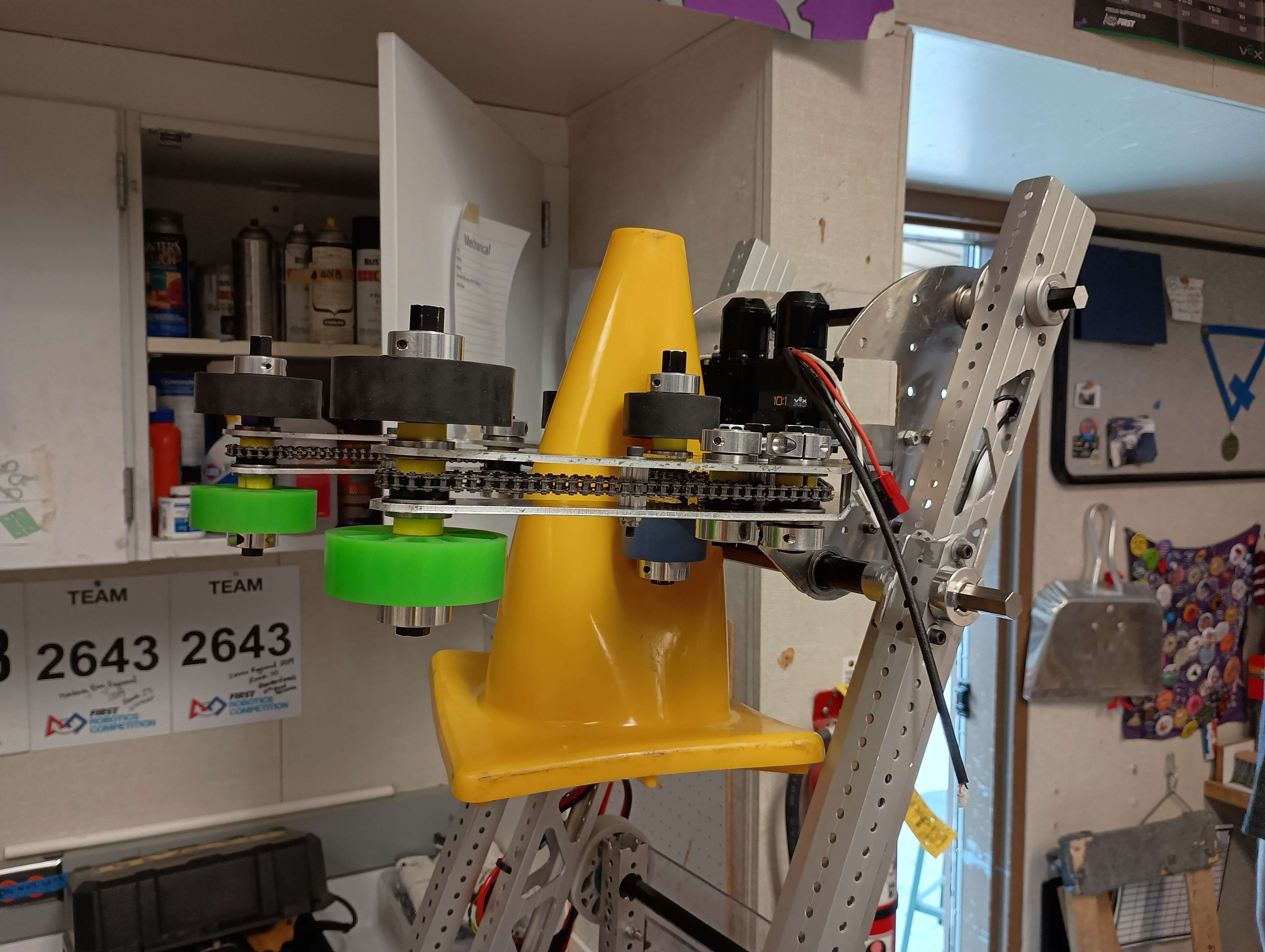
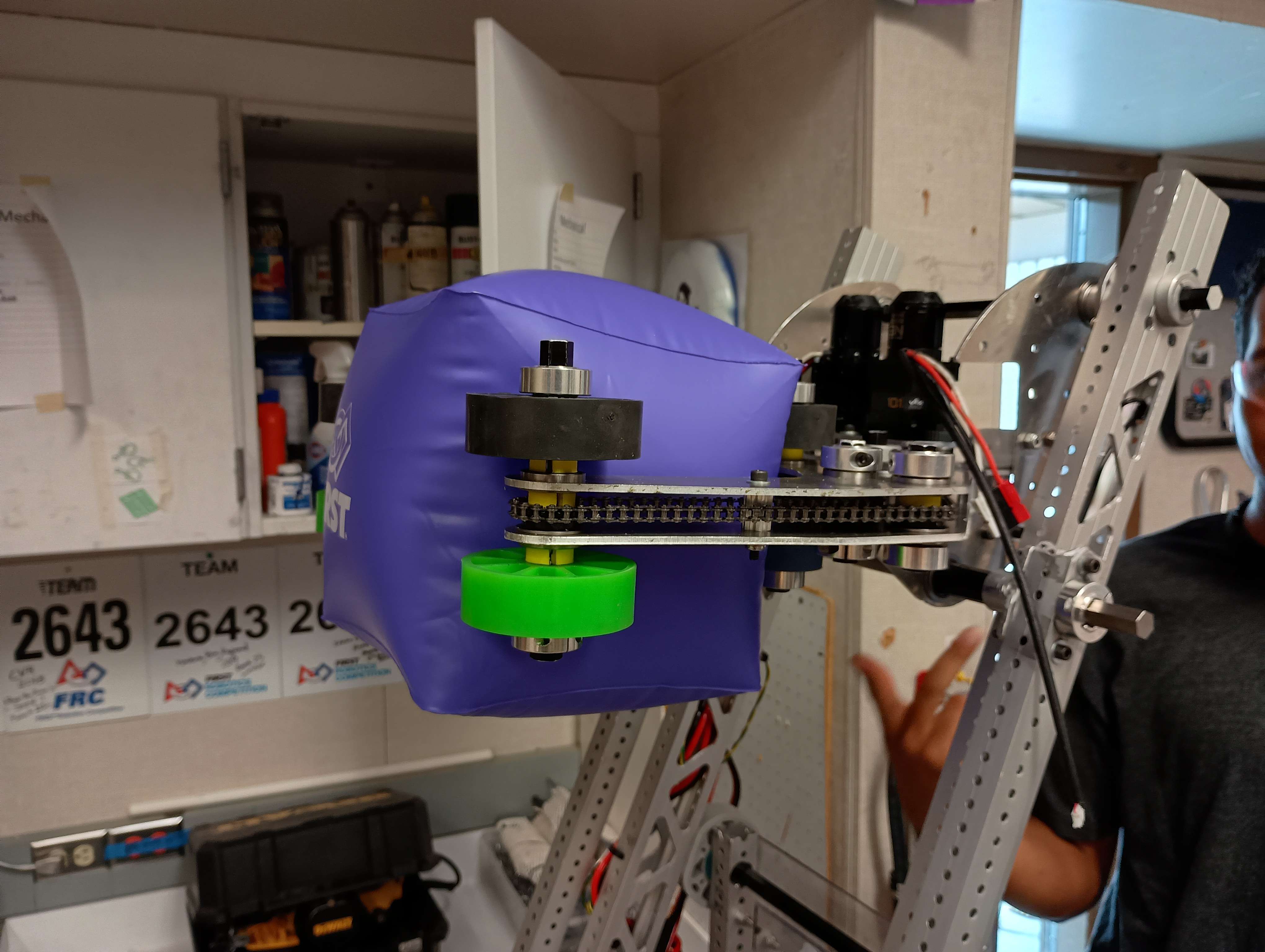
A challenge with this robot was the shooter, which also functioned as an intake, as it was structurally weak and vulnerable to collisions from other robots or field elements. The biggest concern was the motors operating the flywheel being exposed on the side. I led a two-part mitigation strategy for this, involving training drivers to retract the shooter before moving and designing 3D printed motor covers to shield the exposed motors.
Robot in action!
Design
In the previous seasons, my team attempted a robot design that could complete all tasks on the field, aiming to be a jack-of-all-trades. This over extension of resources led to mechanical complexity that compromised the reliability of all subsystems.
In 2024, as President, I made the strategic decision to narrow our capacity. We focused exclusively on becoming a high-efficiency scoring robot. This way, we simplified the scope and could dedicate more time to testing and training with an intake and shooter mechanism that was reliable, leading to significantly better rankings during competition.